
2013.9.11 走行距離 61,100km フライス盤 スピンドルモーター換装 試運転偏
自分は、安易にチャイナフライスを購入した、結果、いろんな面で不満が発生。
低速トルクも不満、使いづらく感じるようになり、2013/07月ころから、モーター換装を考えるようになった。
モーターには、三相モータやACサーボモータが有るが、小さなXJ9512に合うモーターは、必然的にコンパクトなACサーボモータと決めた。
ところが、、、、。
サーボアンプとモータの関係をなかなか、理解できずに、技術書を良く読解し、先達者に聞いたり、 三菱のQ&Aに聞いたりと、行ったり来たりを繰り返す日々(^^ゞ。
そんな中、2013.9.13、閃いた!! この日から、何とかなると思い、取り掛かった。
やってみたい、でも、自分の様に電気音痴、そんな人の一助となればと思い、ここに発表することに、 ここまで、多くの方にお世話になりました。 改めて、御礼を申し上げます(__)
構 成
1、学んだ事
2、必要な物
3、アナログ制御でのサーボアンプの使い方
A速度制御用インターフェース
BサーボON等制御
C電源遮断と非常停止
4、ノイズ対策
5、実態配線図
6、立ち上げ
①、技術書 4-1 配線の確認
②、パラメータ設定
③、テストモード
1、学んだ事・文献
先達者の方から、アドバイスを受けて、以下の点について学びました。
・お世話になった掲示板 サーボアンプ 三菱の質問コーナーです。
・サーボアンプ、制御全体ついては、
ACサーボアンプ実践コース ・三菱のeラーニング シーケンス制御
・フリーサーキット 接点の基本(スイッチ、リレー) ・初歩配線の基本、スイッチについて
・リレー
・可変抵抗器 ・電子部品図鑑(受動部品編)
・サーボアンプの技術書 MR-J3-□A ・絵とき第二種電気工事の基礎 ・絵ときシーケンス制御活用自由自在
2、必要な物
主回路電源の内、CPからサーボアンプ(L1,L2,L3(単相の場合使わない))迄の電線:頁12-71・-73 600Vビニル電線(IV電線 2m㎡ ≒2sq)
電磁接触器からサーボアンプ(L11、L12)迄の電線:頁12-71・-73 600Vビニル電線(HIV電線 1.25m㎡≒1.25sq)
ランインフィルターノイズ
技術書 頁1-21 三菱製FR-BEF01
中継端子台ケーブル・中間端子・中間端子以降の電線
 中継端子台ケーブル
中継端子台ケーブル技術書 頁1-21 、頁12-2、-5三菱製 MR-J2M-CN1TBL05M
中間端子台
技術書 頁1-21 、頁12-62三菱製 MR-TB50
中間端子~制御スイッチ等
技術書を見てもハッキリとしませんでしたので、MR-J2M-CN1TBL05Mの電線が0.3SQということから、電線:0.75SQを購入した。
マイクロフォン用のでシールド電線で、ツイストではありません。
モータ検出器ケーブル
技術書 頁 3-63、-64 、頁12-6 三菱製 MR-J3ENCBL□M-A2-L
ACサーボモータ
 モーターなら何処のメーカーでも良いというわけにはいきません。 アンプごとに指定されています。
モーターなら何処のメーカーでも良いというわけにはいきません。 アンプごとに指定されています。J3の400Wの場合、HF-MP43かHF-KP43になります。
汎用性が無いせいでしょうか、思いっきり高価です。 そこで、中古を詮索中、某オクでゲット。
2014.1.21 ACサーボモータをHF-MP43に変更
ACサーボアンプ

MR-J3-40A 主回路電源入力:2.6A/制御回路電源入力:0.2A 。
2013.9.11
某オクでゲットした、新古の三菱製 MR-J3-40A(GA)が着ました。 市場価格7~8万はする。 1福沢でゲット、良い買い物でした(*^_^*)
MR-J3-40Aは、単相AC200Vで動作します。 丁度、この時期、単相AC200Vのエアコンがくたびれてきていまして、買い換えることにし、 物はついでということで、車庫に単相AC200Vを引きこみ、サーボアンプもJ3に対応した次第です。
棒端子
 技術書 頁 3-19、-20では、電線の端末処理用に、バリオクランプ4 206-204を指定しいしているが、高いので、代替の棒端子にした。ニチフ製
技術書 頁 3-19、-20では、電線の端末処理用に、バリオクランプ4 206-204を指定しいしているが、高いので、代替の棒端子にした。ニチフ製DC24V電源
oldmanさんから頂きました。
cosel社製 P30E24E-X 入力AC200V、定格負荷:0.35A 入力AC100V、定格負荷:0.6A
使い方

入力用AC接続が赤丸の2つ、出力用DC24Vが緑丸の2つ、黄色丸がアース用、出力調整用VRは、青丸です。 試験の時に、コンセントをブスッと差し込んで、針が振れた時は興奮しました(笑)
速度制御用スイッチ
| 用途 | 種類 | カタログの使用電圧 /実際の使用電圧 | 定格電流(定格使用電流)/実際の電流 | 回路 | 動作 | メーカー・形番等 |
|---|---|---|---|---|---|---|
| リセット | プッシュスイッチ | DC24V /DC24V | 120W /5ma(メーカー回答 | 1a | オルタネイト | フジックス製 RC1121 バイクショップでホーン用として売っていた。24V、OK。 技術書 頁3-31にリセットの説明があり、50mS以上押すようにあるので、こういったスイッチが欲しいと思った。 |
| 非常停止スイッチ | 押しボタンスイッチ | DC24V /DC24 | 6A /5ma(メーカー回答) | 2a2b | オルタネート | IDEC HW1E-BV411R1回路を非常停止回路と兼用 |
| サーボオン | トグルスイッチ | AC250V | 10A | 2a | オルタネート | パナソニック T210K-F 2P | 正転・逆転始動 | セレクタスイッチ | DC24V /DC24 | 24A /5ma(メーカー回答) | 2a | 3ノッチ | omron A22S-3M-20 |
| 準備完了 | RA5 リレー | DC24V /DC24 | 接点 :10A・操作コイル 21.8mA/ 制御回路電源入力:0.2A | 2c | omron G2R-2SD カタログサージキラーは、無。RDからの信号を受けて表示燈用 |
主回路電源開閉・緊急遮断
主回路遮断には、MCを使います。緊急遮断のシーケンスには、自己保存回路を使います。そして、緊急停止の信号は、
制御回路のALM~リレー(操作コイル)~接点:故障RA接点の構成になる。
MR-J3-40A 主回路電源入力:2.6A/制御回路電源入力:0.2A
| 用途 | 種類 | カタログの使用電圧 /実際の使用電圧 | 定格電流(定格使用電流)/実際の電流 | 回路 | 動作 | メーカー・形番等 |
|---|---|---|---|---|---|---|
| 緊急遮断用 | 非常停止スイッチ | AC220 /AC200V | 3A / 2.6A | 2a2b | オルタネート | IDEC HW1E-BV411R1回路を制御回路の非常停止スイッチと兼用 青丸の端子は、Input24Vで照明が付きます。 |
| 緊急遮断用 | 押しボタンスイッチ | AC220 /AC200V | 3A / 2.6A | 1a | モーメンタリ | omron M22-FG-10MGは操作部が緑色、10はa接点を意味します。停止用は1bでM22-FG-01Mのredも購入。 |
| 緊急遮断用 | 故障RA リレー | AC220V /AC200V | 接点 :10A・操作コイル 21.8mA/ 制御回路電源入力:0.2A | 2c | omron G2R-2-SD DC24 カタログサージキラーは、無。2cの内、1極の接点はサーボオンの開閉に使う。 | |
| 主回路電源開閉 | 電磁開閉器MC 非可逆式 | AC220V /AC200V | 主接点 :11A・操作コイル 30mA/MR-J3-40A 主回路電源入力:2.6A/制御回路電源入力:0.2A | 1a | 電磁コイル | 三菱製 S-N10 カタログサージキラーは、 純正品のUN-SA21 |
可変抵抗器

アナログ速度指令に使用する。 2kΩ 定各電力1W
巻線形可変抵抗器 φ30 RA30Y 20S B202 【東京コスモス(TOCOS)のポテンショメーター】
技術書 頁 3-39 ワット数は、P15R~LG間に DC15Vを出力とあり、許容電力30mA とあるので
P=V×I=15×30mA=0.45W となるが、メーカーから1Wを推奨された。
理由は、2倍ほど余裕を見ないとかなり発熱するとのことでした。
半固定抵抗器 2kΩ又は、1kΩの固定抵抗 0.75W メーカーから1Wを推奨されたが、多回転型の半固定が無かったので、0.75Wにしてみた。用心して、ALを張り付けた。
BOURNS社高精度多回転ボリューム 高精度15回転 秋月電子で購入
3、アナログ制御でのサーボアンプの使い方
初めて、サーボアンプという実物を拝ませて頂いた。
面構えを見ての第1印象、穴が一杯、端子が一杯、上端にデジタルの表示。

1、サーボアンプは、主回路電源と制御回路用電の二つに分かれている。 主回路はACサーボモーター用だとおもう。
2、モーターを制御するには、外部コントローラーからデジタルデータをアンプに送って制御する方法と、シンク入出力インタフェースといて サーボのサーボON等動作用(内部電源DC15V)のスイッチと非常停止用(外部電源DC24V)のリレー、スイッチ等を付けて制御する方法がある。
ACサーボアンプ実践コース を見ると 外部コントローラからアンプに送る信号には、デジタルとパルス列というのが有るらしい。
今回は、自分がやったのは、技術書で云うところのシンク入出力インタフェースだけです。
ア、 シンク入力インタフェースにより B サーボON等を制御する場合は、CN1(コネクター)~③中継端子台ケーブル(MR-J2M-CN1TBL□M ~⑤中間端子台(MR-TB50) この、⑤の端子(ピンNo20,46,42,15,19,17,181,2,28)から電線を出し、スイッチを設けたりする。
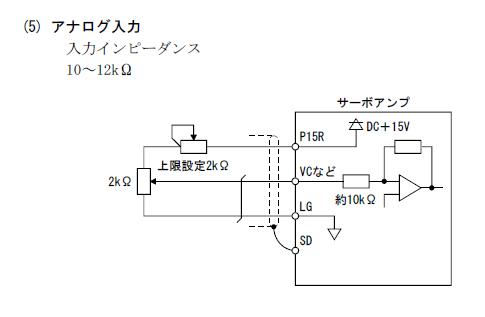
イ、シンク入力インタフェースにより速度制御するには、1番ピン(P15R)2番ピン(VC)3番ピン(LG)を接続、途中、2KΩ半固定抵抗器と 2kΩの可変抵抗器を設けて、電圧の分圧により制御する。
A 速度制御のシンクインターフェースを構築するわけだ。
ウ、シンク出力インタフェースにより外部電源DC24Vを設けて、C 非常停止用にシーケンス制御を構築する。
・ 中間端子台から、非常停止信号用ピン(ALM)からリレーの巻き線コイルへの接続と、このDC24V電源へも接続する。
この、ALMからの電気信号により主回路及び制御用電源を遮断するリレーの電源として使われる。
この電源の注意点は、技術書 頁3-57によると電圧降下によりリレーが動作しない場合は、26.4V迄UPとなっている。
ちなみに、CN1のコネクタは、ピンNoとして、0~45個もある! でも、実際使うのは、ピンNo20,46,42,15,19,17,18,1,2,28,21,48,49だけだ。
A 速度制御のシンクインターフェース
抵抗器のワット数?
技術書 頁 3-39にP15~LG間にDC15Vを出力すると有る。また、許容電流30mAとある。
P15~LG間は直列接続なので、V1=V*(R1/(R1+R2))=7.5V P=VI=7.5*30mA=0.225Wとなるが、メーカからは1W。
半固定抵抗器は、東京コスモス RJC097Pを使用。 調整方法についてメーカーの回答
半固定抵抗2KΩと可変抵抗の調整をされたいとのことであれば、アナログ 出力側(略称MO1)ではなく、VCとLG間で上記の手順で10Vになるように調 整をお願いいたします。
技術書 頁3-38にVCとLG間10Vとあり。
尚、モニタ1(MO1-LG間は8V:技術書5-31)
これを判るには、↓
テスターの使い方(DC直流とDC電圧の計測方法)
直流回路における分圧
可変抵抗器の仕組
オペアンプとは
B サーボON等を制御
技術書 3-12
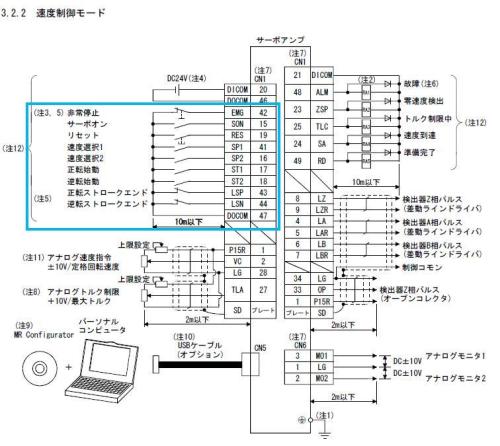 水色枠内の入力インターフェース
水色枠内の入力インターフェース・スイッチの内、正転・逆転ストロークエンドは、入出力パラメータを替えると自動でONとなったり、緩停止するようになる。
・速度選択1・2は、初期値のままにしておくとアナログ速度指令が出来る。
・LOP信号(制御切換)は、制御切換る為の信号なので、速度制御場合は、PA01で速度制御モードに設定していただければ、LOP信号は使用する必要はありません。
・技術書頁3-13 注5.に運転時には、LSPとLSNはONにするようにとある。方法として、短絡する方法と技術書頁3-31にパラメータNoPD01を□C□□に変更する方法がある。
注12 出力インターフェース
・RDは、サーボON状態になるとONとなるので、この信号を使って、ランプを表示させ、準備が整った状態に至ったことを表示させる。
C 非常停止シーケンス
このテーマも判らない日々が続いた。 後から考えると、それも当り前。解る為には、シーケンス制御を学ばなければなりません。
このシーケンス図は、実際に動作する部品たちの配線図とは違っているのですから、素人には参ります。
技術書 頁 3-2、3-57
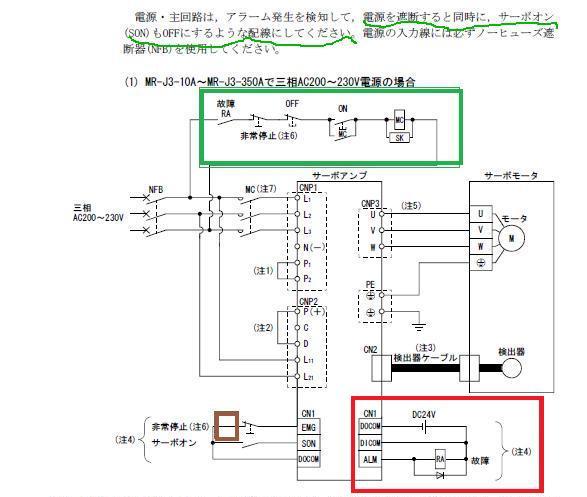
緑下線のシーケンスの方 法
2回路(2bと表記される 押して"接点が開く(break)"の"非常停止ボタン"と、
RAというリレーに2回路の物を選び、サーボオンというスイッチと直列に入れる。
リレー用ダイオード
非常停止にの場合、電流が流れなくなる仕掛けです。この場合、電流が急に流れなくなるので、コイルサージ吸収用のダイオードが必要となる。
自分は、オムロン製 G2R-2-SD DC24 をつかった。
2は、接点極数 Dはサージ吸収ダイオード内蔵
定格通電電流 5A操作コイル 定格電流 21.8mA
リレーに噛ませるダイオードの規格
三菱からの回答 ↓
質問: 制御出力用信号の出ているところにダイオードがあります。
説明ではサージ吸収用ダイオードとあり、技術書 頁12-84にダイオードの最大 電圧・最大電流がそれぞれ、4倍・2倍とありますが、元の数値がありません。 具体的には、種類は、整流ダイオードになると思いますが、具体的は、どういったダイオードを選んだらよいでしょうか?
回答
最大電圧はリレーなどの駆動電圧の4倍以上が基準になります。駆動電圧が DC24Vの場合は4倍のDC96V以上になります。最大電流はリレーなどの駆動電流 の2倍以上になります。ご使用のリレー等の駆動電流をご確認お願いいたしま す。
最大電流:ダイオードの操作コイルの定格電流:21.8mA ×2=44mA
最大電圧=24V×4=96V
例えば どうだろう→秋月電子 汎用整流用ダイオード
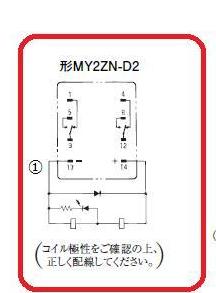
オムロン製 MY2N-D2 DC24
ダイオードには、注意点として、技術書 頁3-1にダイオードの向きを間違えないようにとある。 でも素人にはそれが解らん。
メーカーのQ&Aで回路図を送って照会したら教えて頂きました。 ↓
上の写真の右下□RAはコイルを表していますでしょうか。
宜しければ、13番(-)、14番(+)です。
この場合、13番は、サーボアンプ側(向かって左側)に接続します。
緑枠内は接点で接点は極性ないので、9番-5番ご使用下さい。
茶色枠内にa接点とb接点どちらを使用するのかこちらで判断出来かねます。
全体の回路を把握してご確認お願いします。
a接点:8番-12番
b接点:4番-12番
4、ノイズ対策
技術書 頁12-82参照
ノイズ対策として、制御用信号線にシールド線( 富士電線工業 MVVS 60V耐圧 0.75sq)
サーボアンプの動力線にフラインノイズフィルタFR-BSF01
検出器ケーブルにフフェライトコア
三菱さんに、以下の事も教わりました。
回答
>この対策として、鉄製のフレキ管に入れる方法はどうでしょうか?
→よいと思います。
>それと、ペアの撚り線をシールドされた市販の電線を利用する方法がベターと思いますが、ペアの組み方は、技術書頁12-63に有ると思います。
>このペアにしなければ駄目なのでしょうか?
→このペアにする必要はないと思います。
2013.10.8 5、実態配線図
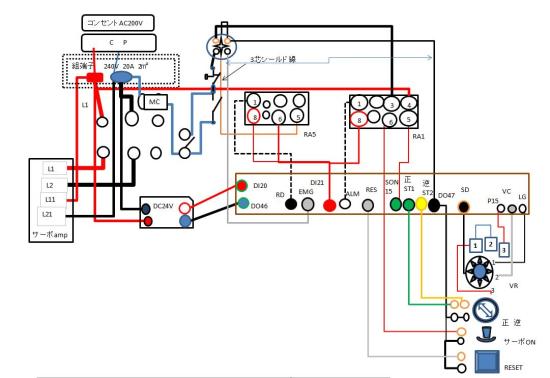
以上までを理解いたところで、2個の可変抵抗器を使った、電圧の分圧、リレーを試したり、自己保持回路を試したり等やってみて、慣れてきたところで、実態配線図を描いてみた。
無論、先達者や三菱さんには、大変お世話になりました。
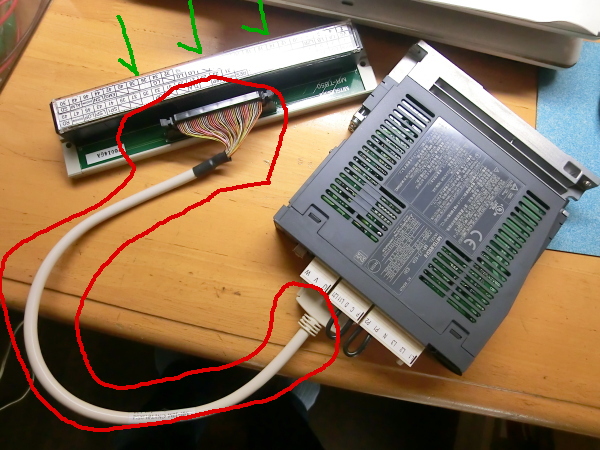
中央の長方形の中に丸が何個もあるのは、中継端子台のイメージです。 実際は、この中継端子台とサーボアンプは、中継ケーブルによって結ばれます。
開閉の問題で、NFBをCPにした。
CPの方が、開閉回数断然大きくとれるからです。ちなみに、遮断機の接点容量は、モーター等の場合、三菱からの回答では、定格電流の1.4倍だそうです。実際は、技術書 12-76により30Aフレーム10Aです。
6、立ち上げ 目安にして下さい。
① 技術書 4-1 配線の確認
※ 技術書 3-78 先ず先に、アースを取る。
技術書 4-2 電源系・サーボアンプ・サーボモータへの配線が正しいか?
技術書 6-17
出力信号の強制出力により出力信号の配線を確認する。
技術書 6-17 制御回路電源ON サーボOFFに。
技術書 6-17 出力信号の強制出力により、CN1:48 ALM、CN1:49 RDを確認
②パラメータの設定
技術書 4-10 サーボSONをOFF、正逆始動がOFF、制御回路電源 ON
電源投入時 表示は 状態表示 表示部:技術書 頁 6-2
MODEを押すと、表示モードが変わる 技術書 頁 6-2
技術書 6-3 状態表示 回転数など UP DOWN 推移させSETで選択
基本設定パラメータを書き換えOKに
技術書 頁 4-1・4-13 6-11MODEを押して、パラメータ PA19を表示。
入出力パラメータ(正転・逆転ストロークエンド等)を自動ONにするので、000Cに変更
速度制御モードにする方法
技術書 頁 4-1・4-13 頁 6-11MODEを押して、基本設定パラメータに表示を変える。
UP 又は DOWNを押して、パラメータ PA19を表示。 技術書 6-12 SETを2回押す → 表示部が点滅
技術書 6-12 UP2回押して、表示を 0002とし制御モードを速度制御モードにする。
技術書 6-12 SETを押して確定する。
パラメータ設定後、電源をOFFにし、再投入すると有効となる
技術書 頁 5-27 拡張設定パラメータ
加速を滑らかにする。
技術書 6-2 表示モードをMODOボタンを押して拡張パラメータに変える 技術書 6-11 UP 又は DOWNを押して、パラメータ PC01を表示
技術書 6-12 SETを2回押す → 表示部が点滅
技術書 6-12 UP2回押して、表示を 0 → 3000とし加速時定数を替える。
技術書 6-12 SETを押して確定する。
技術書 頁 6-11 UP 又は DOWNを押して、パラメータ PC02を表示
減速時定数を0 → 3000(技術書 5-29)に変える
技術書 頁 6-11 UP 又は DOWNを押して、パラメータ PC03を表示
S字加速時定数を 0 →300(技術書 5-29)に変える。
パラメータ設定後、電源をOFFにし、再投入すると有効となる
技術書 頁 3-31 6-2 入出力パラメータ
① 正転・逆転ストロークエンドを自動ONにする。
技術書 6-2 表示モードをMODOボタンを押して入出力パラメータに変える 技術書 6-11 UP 又は DOWNを押して、パラメータ Pd01を表示
技術書 6-12 SETを2回押す → 表示部が点滅
技術書 6-12 UP2回押して、表示を 0000h → 0C00(頁 3-31)とし正転・逆転ストロークエンドを自動ONにする。
技術書 6-12 SETを押して確定する。
② 正転・逆転ストロークエンドを緩やかにする。
技術書 6-2 表示モードをMODOボタンを押して入出力パラメータ(Pd-01)に変える 技術書 6-11 UP 又は DOWNを押して、パラメータ PD20(技術書5-50)を表示
技術書 6-12 SETを2回押す → 表示部が点滅
技術書 6-12 UP2回押して、表示を 0000 → 0001とし正転・逆転ストロークエンドを緩やかにする。
技術書 6-12 SETを押して確定する。パラメータ設定後、電源をOFFにし、再投入すると有効となる
③ 技術書 4-12 頁 6-19 テスト運転
技術書 4-10 サーボSONをOFF、正逆始動がOFF、御回路電源 ON 主電源 ON
* トルクモード、速度制御モード等有りますが、サーボモータは、パラメータでモードを設定し直さないと、替える事が出来ません。
技術書 6-19 JOG運転
技術書 6-18 MODOボタンを押して 診断→診断画面を表示する。
JOG運転 選択
SET2秒以上押す→画面が変わりJOG運転がOKとなる
技術書 6-19 操作・運転
技術書 6-19 JOG運転終了
④ 技術書 4-12 サーボモータ単体でのテスト運転
非常停止EMG・サーボ ON サーボオンになると表示部に準備完了(RD)がONになる
アナログ速度指令VCを入力ST1、ST2を選んで、印加圧電圧を掛ける
可変抵抗器と半固定抵抗器の調整方法ですが、可変抵抗器を右一杯に開けた後、半固定抵抗器を右に開けていきます。
この時、サーボアンプで回転数を確認できますので、3000rpm(技術書 5-31 パラメータPC12、初期値)迄行ったら半固定抵抗器は丁度の位置になります。
2013.11.07(土曜)試運転を成功裡に終える事が出来ました(^◇^)しかし、9月から始めて、2か月もかかってしまいました(^^ゞ↓
ACサーボモーターを3000rpm迄回しました。モーターは固定していませんが、 振動がほとんど無く、また、音もほとんど発生しませんでした!!
凄い工業製品だと感じました。