
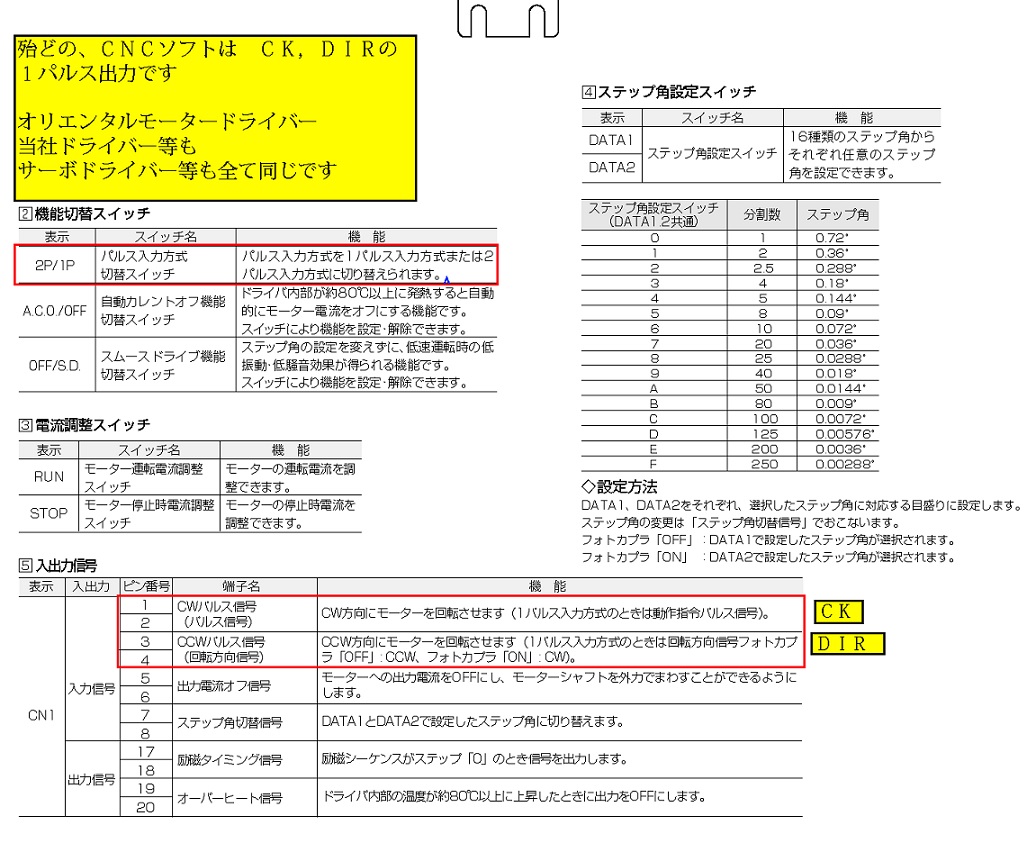
2020.1.6 主軸モーター反転
3軸と主軸をサーボモーターで制御できるようになり、使っている内に、やはり、タッピングも自動化したくなった。
SEC基板からモーターの回転用信号と回転方向用信号を取り出せるのが分かってきたので、
主軸を反転させるインターフェースを作ることにした。
構 成
1、部品
2、反転回路
3、テスト
4、基板制作
5、作業を終えて
2020/03/03追記 サブプログラム
1、部品
オムロンに極性反転用のC接点の半導体リレーを確認したが、高価なので、機械式リレーにした。
しかし、本当は、半導体リレーにしたかったが、高価だったので、機械式にした。
リレーを半導体リレーにしたかった理由は、回路で述べる。
TX204(C接点 2極 プリント基板用)
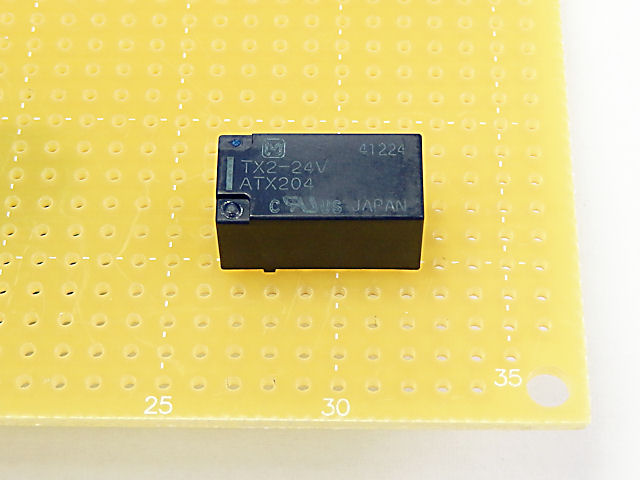
コイル定格DC24V、 定格電流5.8mA コイル抵抗4114Ω
開閉部 定格負荷DC30Vで2A
動作時間4ms

汎用整流用ダイオード 1000V1A 1N4007
100V1A
フォトカプラー
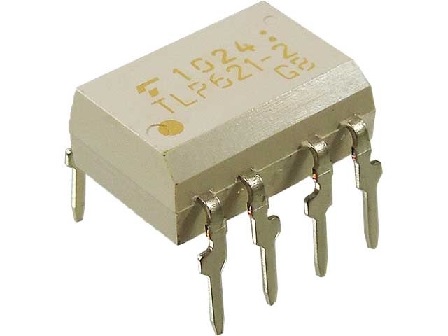
TLP621-4
変換効率600%
発光側 順電流 IF 16mA、順電圧 1.2V
受光側 コレクタ電流 1〜10mA 受光側にあるコレクター 〜 エミッターに流れる電流です。
絶対定格
受光側 エミッタ・コレクタ間電圧V ceo 55V
フォトカプラーで駆動するリレーは、パナソニック 定格電流5.8mA、DC24V駆動、操作コイルを励磁させるには、5.8mAが必要。
トランジスターの変換効率は順電流5.8mAで、90%〜300% →150%にして、 ベースには、5.8/1.5=3.9mAでOK
その為には、ベースの前に抵抗RRを配置して、電流を抑えなければなりません。
順電圧は、順電流3.9mAの時、1.2Vの電圧降下ですので、Rb=(5V-1.1)/3.9mA =1000Ω
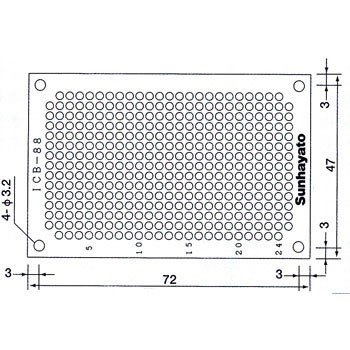
ユニバーサル基板
ICB-88GH
66×41mm
2、テスト 極反転回路
半導体リレーにしたかったのは、反応速度合上げたかったらです。
ここにあります。
ns単位で制御していますので、機械的要因による遅さは別にして、電気的特性は合わせたかった。
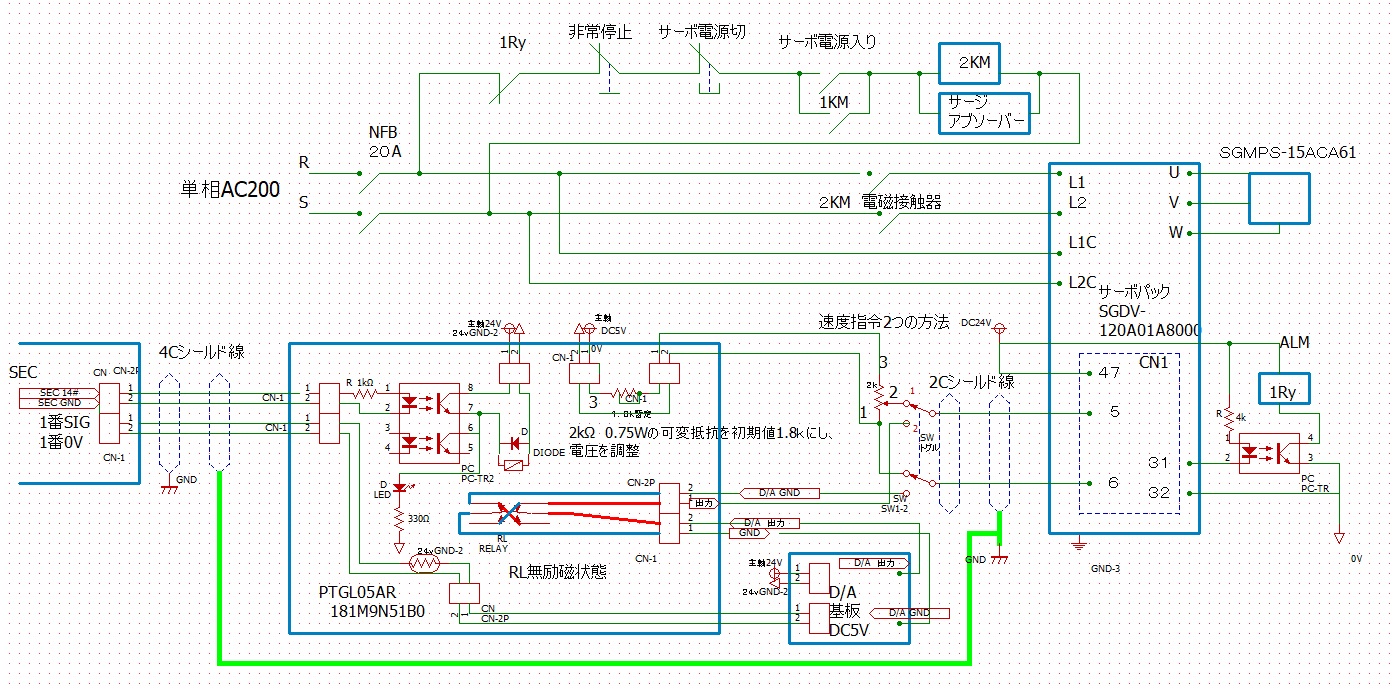
回路の動作
回転方向を変える信号をDIRと呼んでいる。 私のMACH3の設定の場合、DIRの信号は、正回転なら0Vで、逆回転で、5V。
実は、下の回路図は、DIRがON時には、リレーが励磁するように作ってしまった、
原因は、DIR信号の確認しかせずに、Step信号は出るだろうと思い込んで作ったのです。しかし、
作業半ばで、DIRの信号は出るが、逆回転時にMACH3からStep信号が発生しないことが分かったからです。
ま〜、あとから分かったということはよくありますよね。
そこで、
Machサポートを調べて、逆回転時にもMACH3からStep信号が発生する設定方法が分かった。
しかし、この場合、逆回転時にDIR信号がHiとなるので、作ってしまった基板を生かすために、基板への差込を反転させた。
モニター用LEDは、反転時発光。
MACH3の設定方法が分かったPDFファイルの題目は、 Mach3 - Spindle Control
****************
グーグル訳
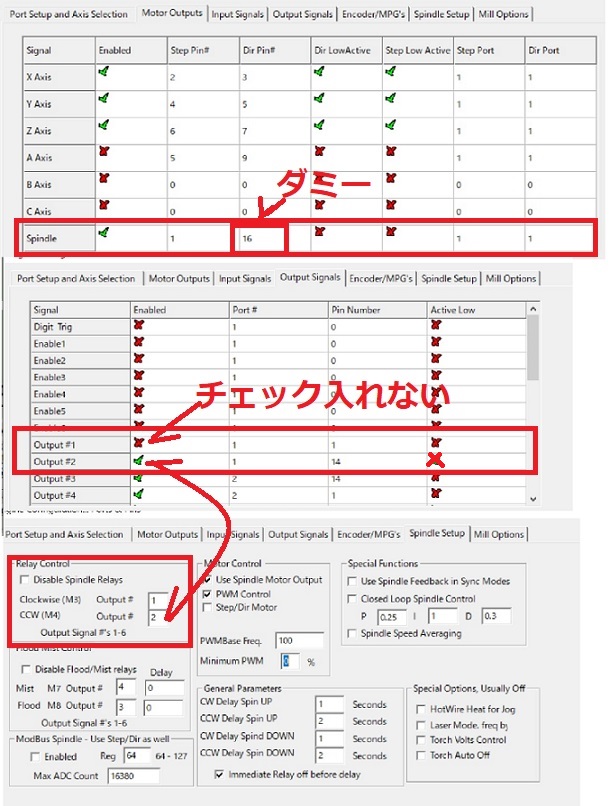
「スピンドル」をチェックし、PWMからDC電圧コンバータへのPWM信号出力用にピンを定義する必要があります。
PWMアナログDCコンバーターに接続されているピン14ポート2を選択しました.
図16に示すボード。
注:Mach3 Millマニュアルでは、PWM制御の方向ピンを定義する必要がないと規定されていますが、
Mach3とSmoothStepperの組み合わせを満足させるために定義する必要があることがわかりました。
ピン1ポート2として定義しましたが、何にも接続されていません。
なぜこれが必要なのかわかりませんが、私にはうまくいきます。
*******************************
実際、smoothstepperの場合、DIR用信号のピンを「0」にして設定しようとすると、 StepとDIR用に2ピンを設定していないと、指摘されます。 でも、PWMで制御するには、Spindle設定のDIRを0にし、
Outputの設定でDIR用に端子を設定、さらに、CCWの設定をRelay ContolでCCW用のピンを設定しないと
逆回転時にPWMが出力されないのです。
困ったな‾と、考え込みましたが、前途の「ピン1ポート2として定義しましたが、何にも接続されていません。」
をみて、ダミーで16をDIRに入力すればいいと思いつきました。 その結果が写真です。 この設定で上手くいきました。
補足
Relay Contol CCWのOutput#の枠内に2としてあるのは、私の場合、DIR信号用にOutput2番を使っています。マッハのOutout SigunalsのOutput#2とおなじI/Oを示す。
速度0時のPWM出力2.9mV
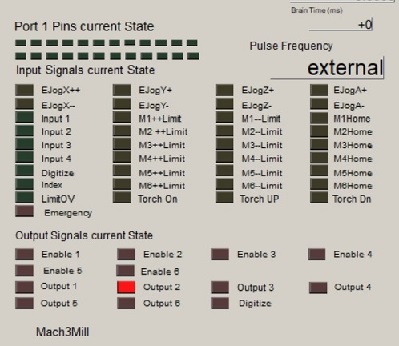 反転すると、OutPut2が点滅します。
反転すると、OutPut2が点滅します。サーボアンプの技術的反転方法
サーボアンプ側に正極で印可し、反転の時は、リレーでサーボアンプ側に印可する 出力先をGNDがわにする。
安川の回答
※ 同様の回答が下にもあります。
速度制御時にはCN1の5-6に印加されるDC電圧の極性で回転方向が変化いたします。
そのため、CN1の5と6の配線を入れ替えることで回転方向の変更が可能です。
モニター用LED
取説では、順電流5mAで順電圧3.1Vです。手持ちの抵抗3.9kΩで計算すると
(24-3.1)V/3.9kΩ=5.4mA 、これなら、大丈夫でしょう。
反転時に発光します。
前途のここにあった所に公開されていた写真をお借りしました。
で、先ずは、極性が反転するか否かを実験↓ ↓
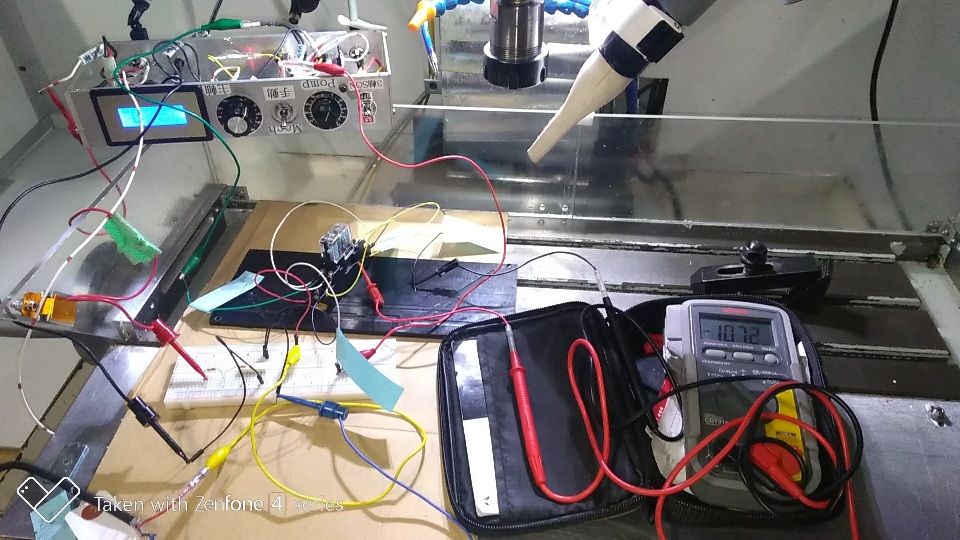
今回の実験は、比較的シンプルなので、いきなり、既存の配線に割り込ませた。 毎度ですが、何度も接続を確認します。

実験の時は、手元のリレーを使った。G2R-2-SD これは順電流が21.6mAなので、フォトカプラーもダーリントン接続 のコレクター電流の大きいやつをかった。
極性だけを見るので、テスターで5#・6#に接続する配線をテスターで確認します。
3軸と主軸は制御電源のみONです。 マッハの設定も確認し、火入れ
正回転の時は、正極で出力、逆回転時は負極で出力されました。
* この時は、まさか、Step信号が出ないとは思いもよりませんでした。
ちなみに、安川からも以下のとおり回答
件名 :技術相談
内容 :
速度制御におけるモーターの回転を逆転させる方法について
現在
単相AC200 SGDV-120A01A008000 SGMPS-15ACA61
速度制御
回転方向を以下の方法で変えることができますか。
上位装置からの2本のD/A変換出力端子(正転パルス・逆転パルス)をCN1の5に接続し、
上位装置のGNDをCN1の6に接続する。
【回答】
速度制御時にはCN1の5-6に印加されるDC電圧の極性で回転方向が変化いたします。
そのため、CN1の5と6の配線を入れ替えることで回転方向の変更が可能です。
お問い合わせいただきました配線例がわかりかねますので、上記仕様をもとにご検討をお願いいたします。
回転方向の変更が一時的なものではなく、恒久的なものであればPn000.0を変更することでも変更可能です。
3、基板製作
ここにきて、CNCフライスで基板を作ろうかと思ったが、やり慣れた手法で製作することにした。
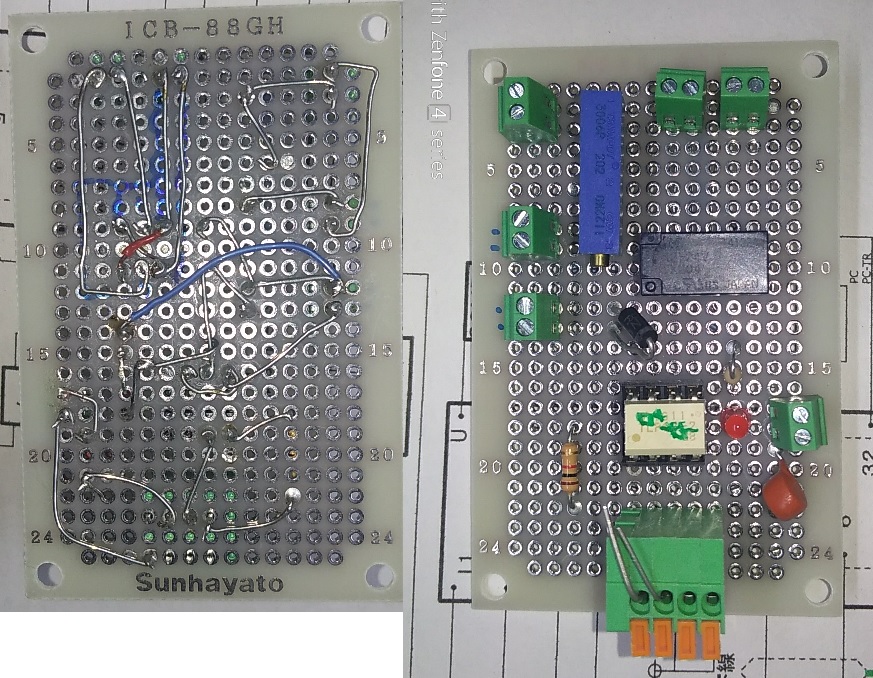
サンハトヤのICB-88GHを使用
合成写真右側の左上側にある青色の長方形の物体は、多回点可変抵抗です。 多回点じゃないと精度が出ません。
5、作業を終えて
このプランを始めた当初、Mach3には、切子で折らないようにするM29や、
タッピングの固定サイクルG84もないので、5㎜程タップし、最後に手作業で最後のねじ切りをすればいいやと思っていました。
これなら、当初の計画どおりに行けそうです。 (^^♪
2020/03/03追記
サブプログラムによるタッピング
(Initial Value);
#1=0;
#2=0;
M9;
M5;
(Fuctory Setting); G54 G40 G80 G49;
(Drill Cycle); M7; S1500 M3;
G98 G83 G17 X0. Y0. Z-15. R2. Q1.25 F30.
G80;
M5;
M00;
(T9 D=6 RIGHT HAND TAP)
N2;
G54 G17 G40 G80 G49;
G90 G0 X0 Y0 Z5 S30 M3;
(P1 Sub Program 2Call);
M98 P1 L2;サブプログラムO1を2回呼び出し
M4 Z2;サブプログラム2回実施後、主軸逆転し回転速度・送りは切込み時のままでZ+2まで上昇
G00 Z15;
G28;
M30;
O1
G90 M3;
#1=[#1-7];
G1 Z#1 F30;
M5;
#2=[#1+2];
M4 S30 Z#2;
M99;