
2020.10.29 ML4 Mach3のINDEX(回転計)
気にはなっていましたが、入力端子が足りないと勘違いをしていたので、Mach3による回転計を諦めていたが、
電気の知識が向上してきて、ある時ふと思った、それは、SmoothstepperのPort3は入力端子であった事。
上手くいったら、1Iピンが入力端子として使えるかもと気付いた。
構 成
1、購入品
2、回路図
3、バラック的実験
4、Mach3の設定
5、ホールセンサー用ステー
6、作業を終えて
20201112追記
工作室売店さんの回転計
1、購入品
 回転計のセンサーに使われているものは、ホールICやフォトインプラントなどがあるが、
回転計のセンサーに使われているものは、ホールICやフォトインプラントなどがあるが、以前、回転計を持っていて、それに使われていたので、馴染みのあるホールICを使うことにした。
この品は、型番の末に-Aと付いているせいかどうかわかりませんが、ホールICのトランジスターの動作に注意。
動 作
ホールICに磁石が近づくと。IC内のTrにバイアス電流が流れませんので、コレクターからエミッターに電流が流れません。
従って、コレクターに繋がっているICの出力端子がHiとなり、ホールICの出力端子に繋がっているSS基板の入力端子(1I)はHi状態です。
ホールIC DN6851-A
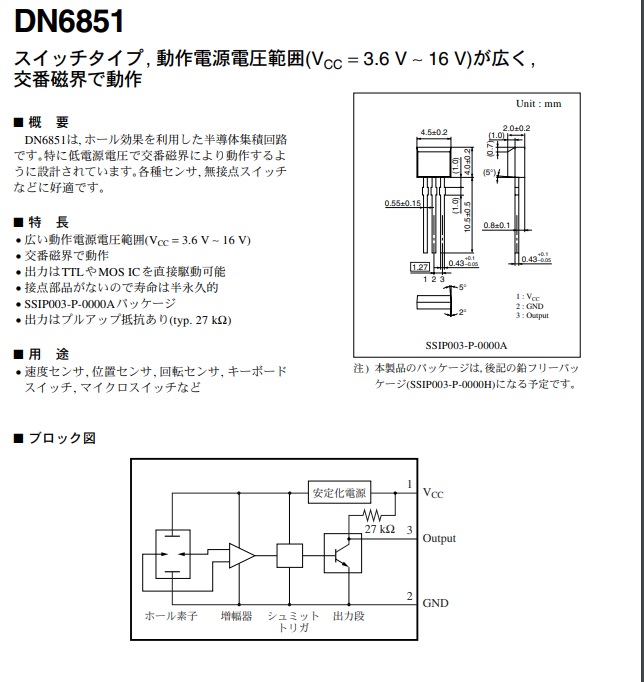 プルアップ抵抗27KΩを内蔵されているので、動作安定の為のプルアップ抵抗を後から付けなくても済むので
、便利です。
プルアップ抵抗27KΩを内蔵されているので、動作安定の為のプルアップ抵抗を後から付けなくても済むので
、便利です。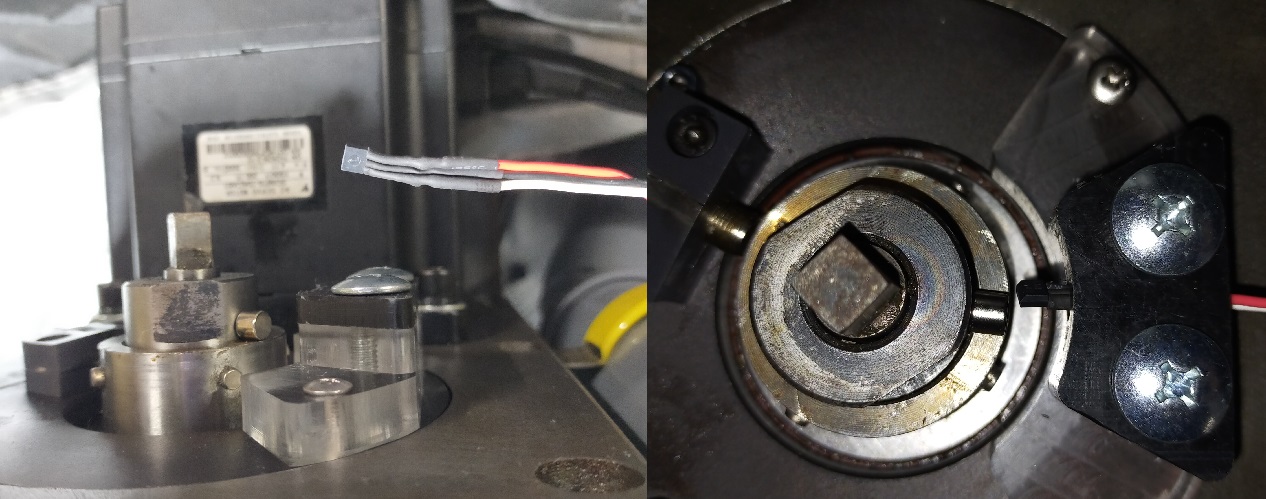 磁石の取り付け方法を悩みました。 同型ホールICを使った説明が
ここに詳しく記載されています。
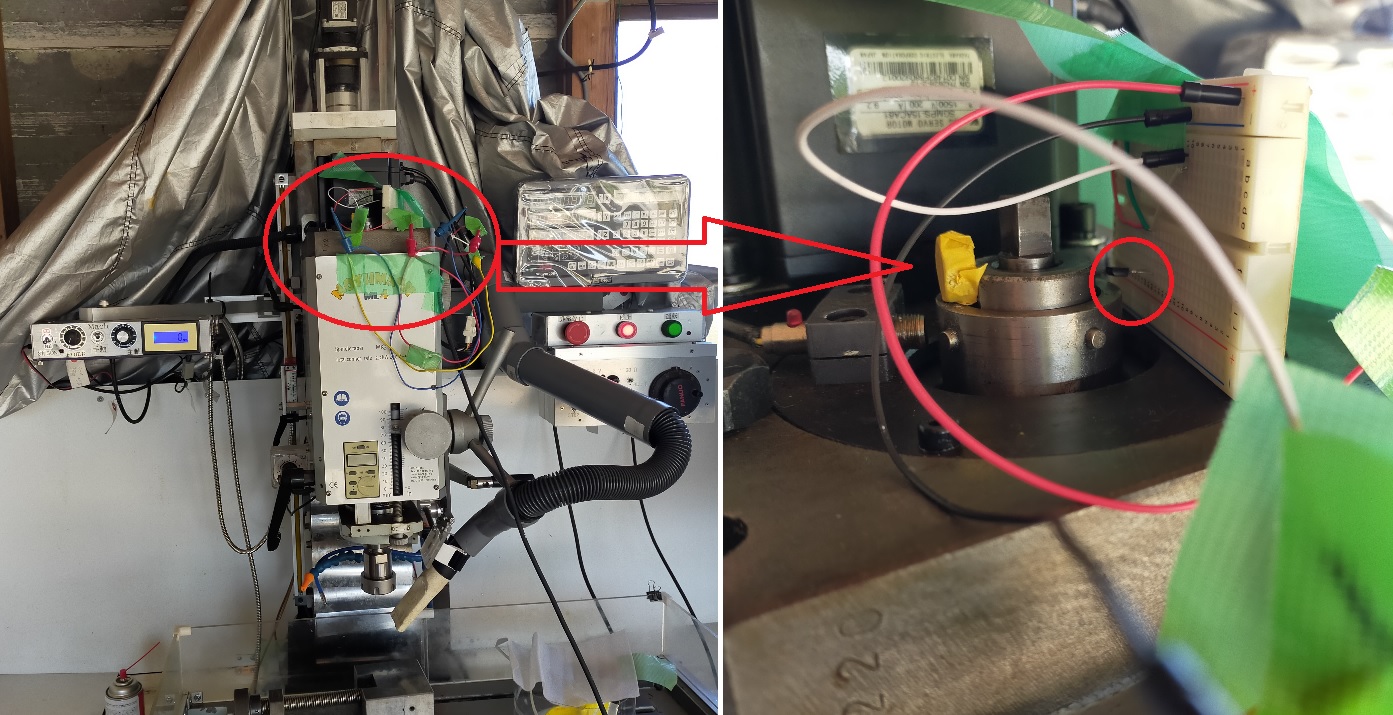
実験の結果は、写真のような向きにつけると、ホールICを少し過ぎた位置でホールICがHiになった。 自分は、写真と逆向きにする。
磁石の取り付け方法を悩みました。 同型ホールICを使った説明が
ここに詳しく記載されています。
実験の結果は、写真のような向きにつけると、ホールICを少し過ぎた位置でホールICがHiになった。 自分は、写真と逆向きにする。
磁石は、φ6×5mm ネオジウム磁石
磁石は接着剤で固定したが、2500rpmでも、主軸に張り付いていた。
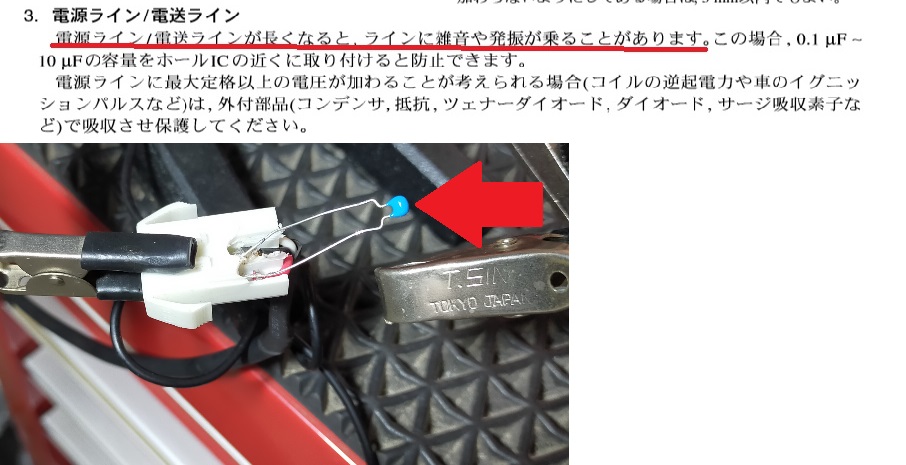 誤作動防止用の0.1μFのセラミックコンデンサーは、写真の位置につけました。ホールICにできるだけ近い位置です。
誤作動防止用の0.1μFのセラミックコンデンサーは、写真の位置につけました。ホールICにできるだけ近い位置です。
2、回路図
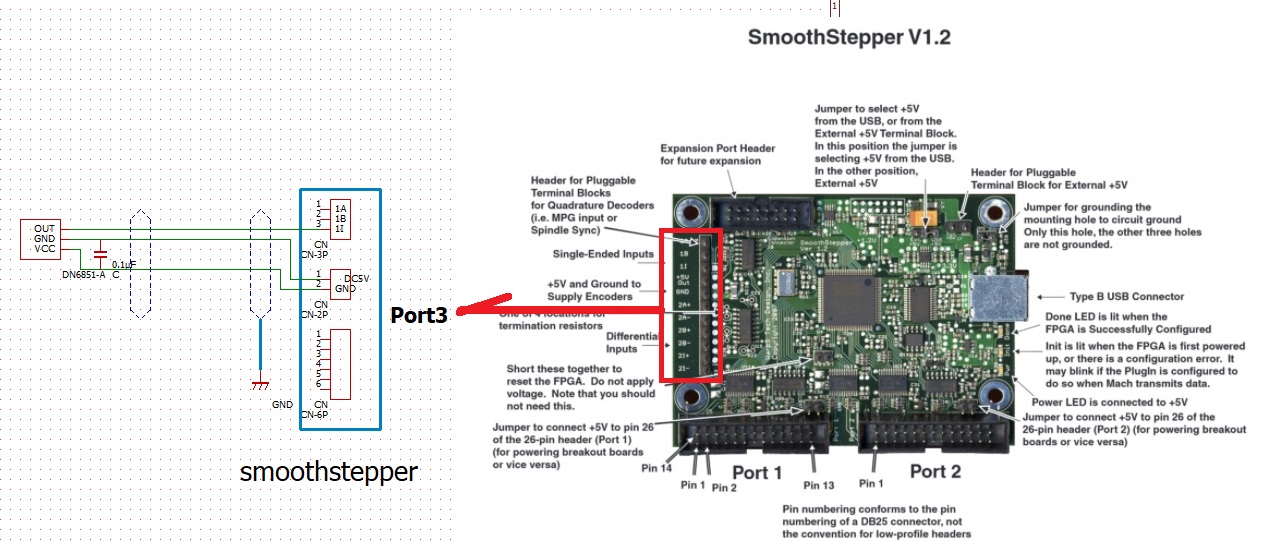 DN6851-Aは、データシートによるとTTLなどを直接ドライブできるので、簡単な配線で済みます。
DN6851-Aは、データシートによるとTTLなどを直接ドライブできるので、簡単な配線で済みます。具体的には、
ホールICの出力端子をSmoothstepperのPort3の1I端子に繋ぐだけです。
なお、ホールICの電源には、便利なことにSmoothstepperのPort3の1I端子直下にホールIC用のDC5V電源からとれます。
3、バラックで実験
 とりあえずということで、いい加減な設置方法です。
とりあえずということで、いい加減な設置方法です。今回は、簡単でしたので、一発で動作しました。
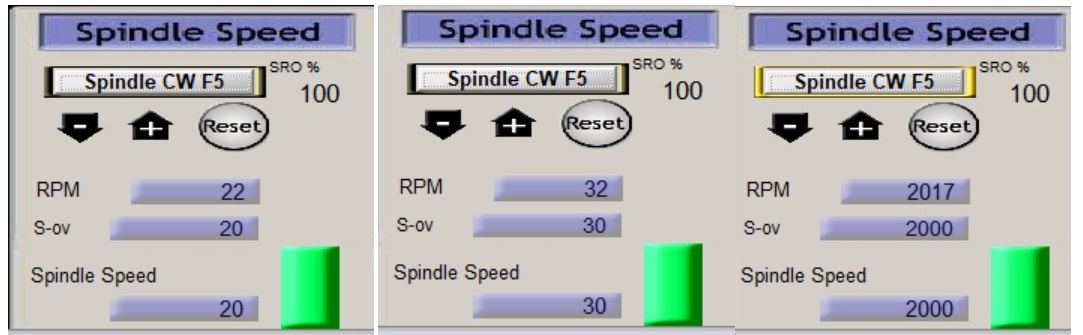 速度の設定値と実測値の開きはアマチュアという事で、突き詰めません(笑い。
速度の設定値と実測値の開きはアマチュアという事で、突き詰めません(笑い。
4、マッハの設定
Smmothstepperの設定方法はここ
 PWMの場合、プーリーSelctionの画面です。
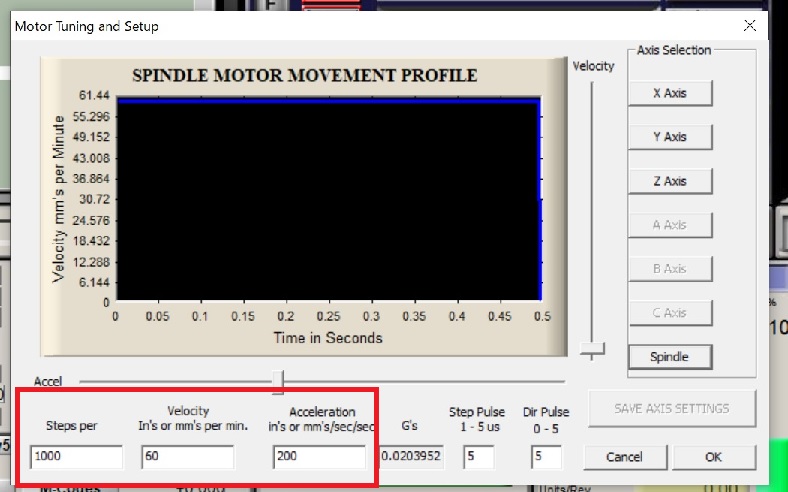
PWMの場合、プーリーSelctionの画面です。Stepps perを1000、その右側を60、赤枠右端を200に設定し、保存して閉じる。 このことは、上記のここ
にありました。以下も同様に記載されていた通りにしました。
以下は抜粋
4.次に、Mach3のメニュー->構成->モーターチューニングに移動します。
[軸の選択]で、[スピンドル]をクリックします。
PWMスピンドルの場合:
'Steps Per Unit'を1000に設定します(このフィールドはPWMには関係ありません。
ここでは、妥当な値が必要です)。 'Velocity'を60に設定します。
Accelerationを「1」より大きい値に設定して、希望する応答を提供します(システムによっては、おそらく200)。
必ず「軸設定を保存」をクリックしてください。
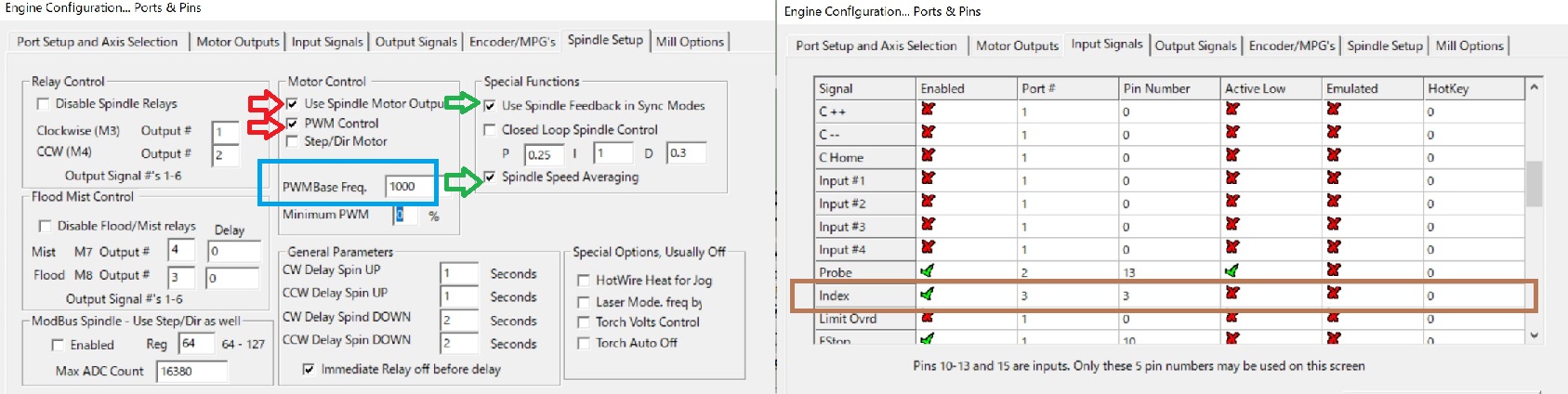
Port&PinのSpindle Setup
PWMの場合は、赤矢印にチェック
PWM Base Freqは標準で10khz~100khzのようです。
サーボモーターの場合は、モーターのエンコーダーにより制御されているようだ。
Mach3のマニュアルによると、「Use Spindle Feedback in Sync Modes」 にはチェックを入れないとあるような気がしたが、
曖昧なところがあったので、チェックを入れておいた。
合成写真右側
Indexの項目にチェックを入れるとMach3の画面で回転数を確認できます。
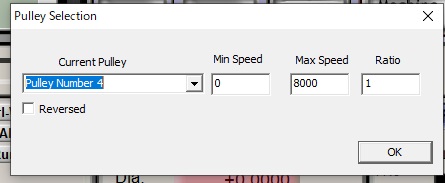
PWMの場合、プーリーSelctionの画面です。
PulleyもWrap9の説明では、4番でした。回転数は、安川サーボモーター定格回転数です。自分は、Max回転数を上げたっかたので、
サーボアンプのPn300のパラメーターを、
本来アンプに印可する最高電圧の5Vにすべきところなのですが、4.8Vに設定。
このパラメーターの設定により、サーボモーターの回転数は、3000rpm*5/4.8V=3125rpmとなる。
で、Pulleyの最高回転数の欄には、主軸の回転数を計測して、その結果2723rpmを入力した。
ML4は、3段のギヤ比を持っているので、本来は、Pulleyの設定も3段階設定するのかな。
その為かと思うが、動画サイト を見ると、Machの初期画面で、ワンクリックで、Pulleyを選択できるようにしている。
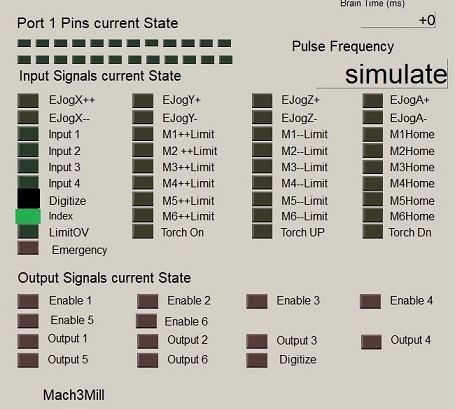 ホールICが、磁石に反応して、Hiになると、マッハの画面で、Indexが緑に変ります。
海外の動画サイト
ホールICが、磁石に反応して、Hiになると、マッハの画面で、Indexが緑に変ります。
海外の動画サイト
5、ホールセンサー用ステー
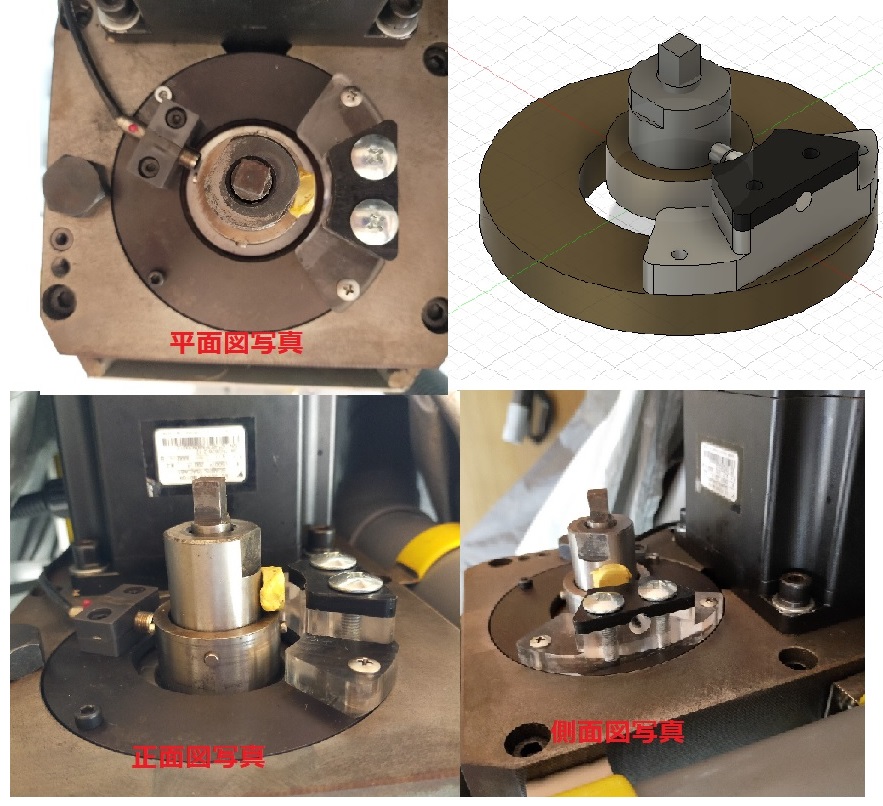 ホールICの台座は、強度はあまり必要がないので、透明な部分をアクリル板、黒色部分は、ジュラコンです。
ホールICの台座は、強度はあまり必要がないので、透明な部分をアクリル板、黒色部分は、ジュラコンです。黄色のマスキングテープでくるんだ磁石は、テスト時のもので、本設時には、アルニコ磁石φ6×5mmにした。
 難関のホールICを入れるパイプは、旋盤でφ6のアルミ棒を加工しました。
難関のホールICを入れるパイプは、旋盤でφ6のアルミ棒を加工しました。配線とアルミパイプは、接着剤で固定しました。 磁石の位置は、クイルの動作に妨げになるので、写真と違い位置を変更。
6、作業を終えて
マッハ3の回転計の機能は意外と簡単に使えました。
速度ですが、設定値と実測値の開きは、サーボアンプの設定をきちんとすれば何とかなるように思えますが、
アマチュアなので、このくらいにしておきます。
20rpmだと解像度が落ちて、回転数表示が一定しません。 具体的には、少しづつ回転数が上がって、最後に設定回転数を表示します。
20201112追記
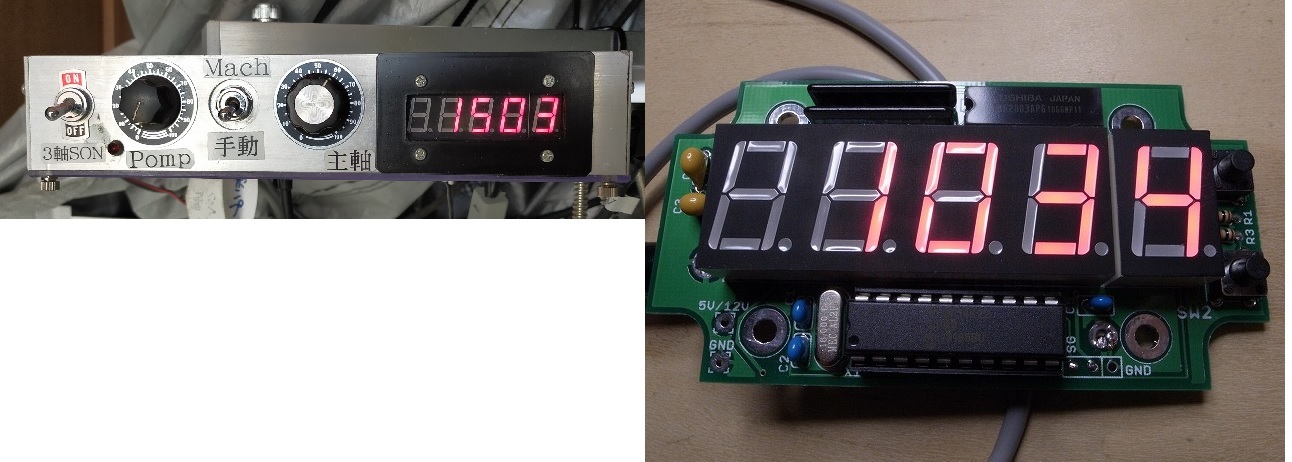 ついでに、工作室売店さんから、回転計を買いました。
ついでに、工作室売店さんから、回転計を買いました。キットですが、30分くらいで完了。
中華製と同じ環境ですが、工作室売店さんの方が解像度が高く、 なにより、Mach3とほぼ同じなのがいい。 それと、mach3用の磁石を1個から2個に変更し 、これに伴いPulleyのratioを2に設定した。 解像度が上がって前途のようなことはなくなった。