
2015.11.20 走行距離 69,000km 手パ
手パ、手動パルスジェネレーターと言います。
マッハ3のJOGモードを、テンキーで操作していましたが、0.01mmの移動となると、ボタンを押す感覚が、アバウトなので、やはり、手パが欲しくなりました。
でも、手パの情報が少なく、自作となると、困難な状態でした。 そんな中、掲示板仲間の有る方が、手パの製作に入りまして、見事に無線で手パを作りました。
その、ある方に、無理を言って、ご指導を頂きました。 この場で、感謝申し上げます。
ここを参考にしました。
構 成
1、必要な物
2、繋ぎ方
3、マッハ3の設定
4、PIC
5、基板完成(便利品)
6、暫定で動作確認
手パの送り量調整方法
6、作業を終えて
1、必要な物

先ずは、ロータリースイッチを求めました。
日本開閉器のMRY-106です。 このロータリースイッチのシャフトの長さは、20mmあります。
いざ買ってみてから、つまみを探すと、φ3mmのつまみがなかなか見つかりませんでした。
胴が、φ14mmで、細くていいのですが、使い安そうなつまみは、大抵がφ6mmです。
スイッチ自体は、接点数をスイッチ本体で、変えられるので、使い勝手がいいロータリースイッチであるのですが、 つまみが限定されるので、残念です。
付属のつまみは、事前に操作感を試しましたところ、細くて使いずらいです。 後から、買いなおしました。

手パです。 日本国内では、大変高価な品です。
そこで、AliExpressで購入。
一応、FANUC製の表示とMade In japanの表示があります。 型a860-0203-t001
5V操作です。
2、繋ぎ方
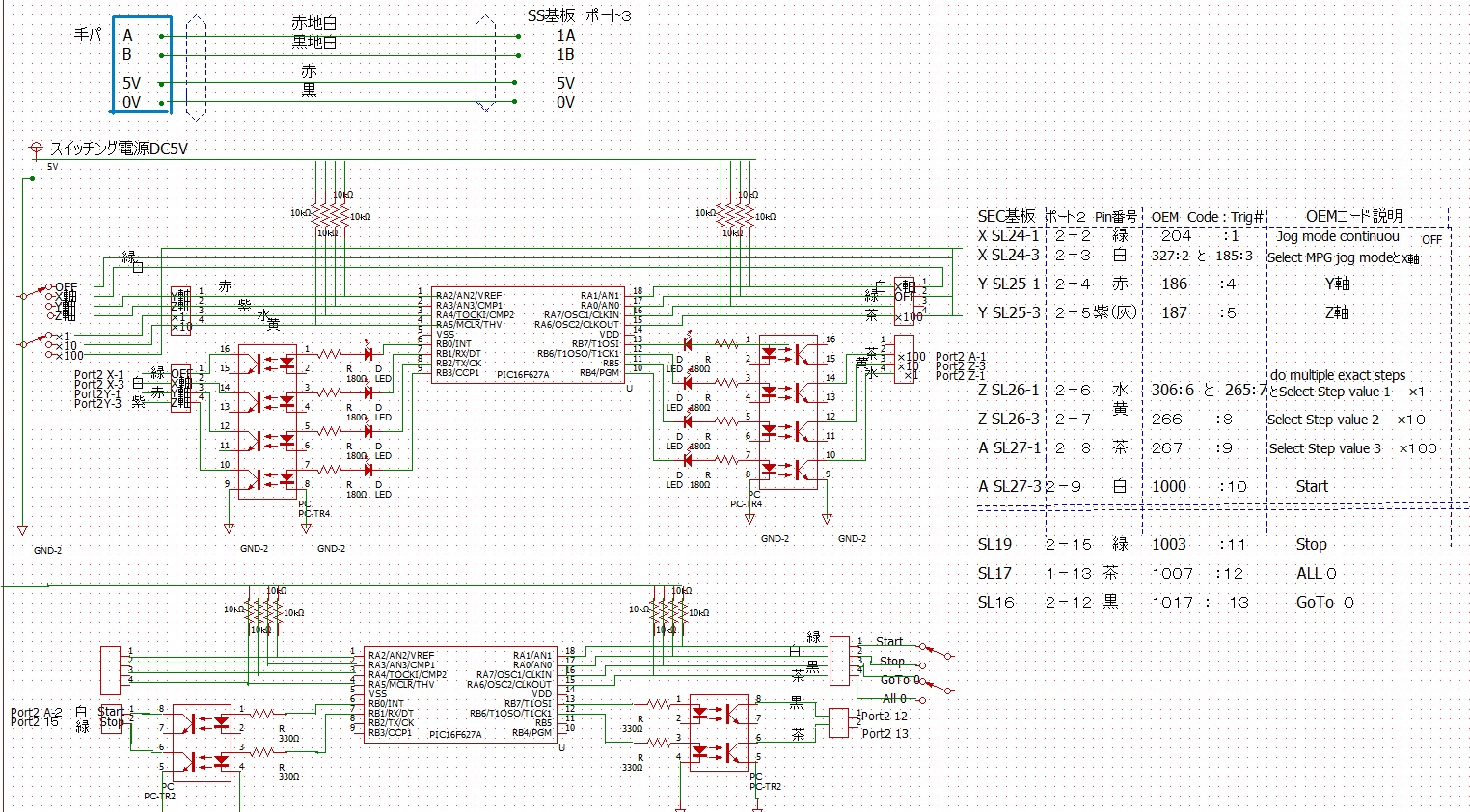
ある方に教わりました。 SSのポート3も、SEC基板も、全て、入力端子です。
フォトカプラは、TLP521-4 2回路入フォトカプラ 赤外LED+フォトトランジスタ TLP621-2
PICは、16F627A
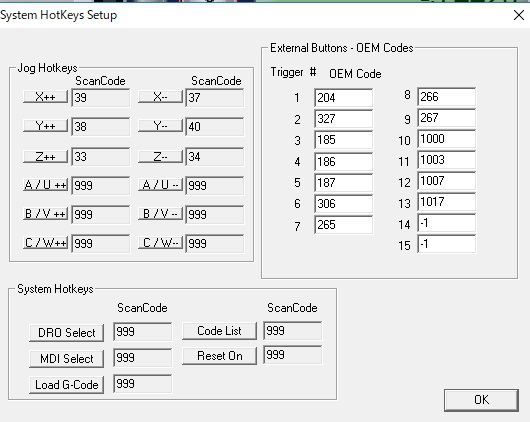
OEMコードは、ここ
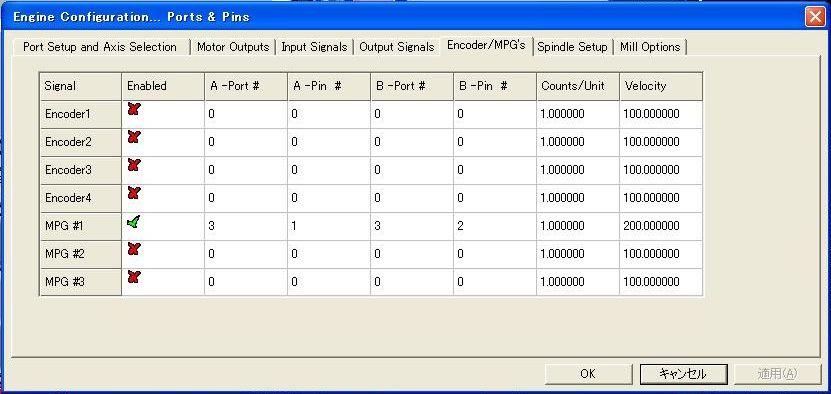
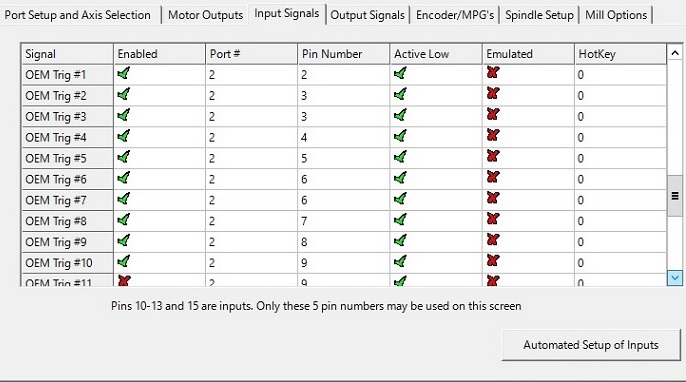
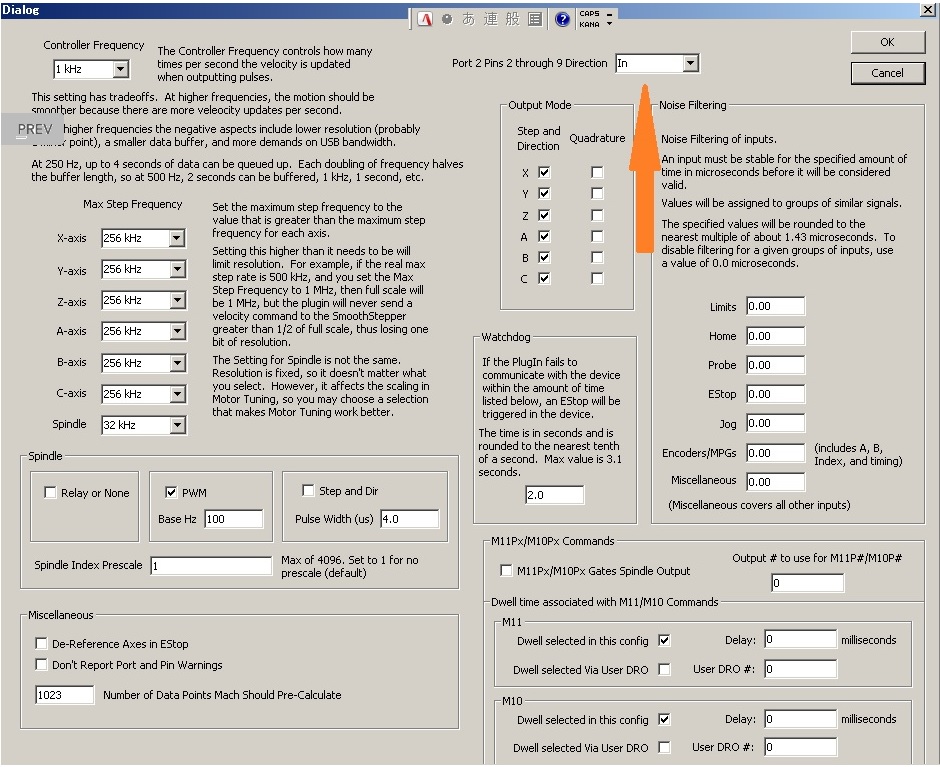
3、マッハ3の設定
4、PICを利用する
ちょっと前から学習を始めたので、先達者の方々に大変お世話になりました。 改めて感謝申し上げます。
/***************************** STEP11_Switch.c *****************************/ #define _LEGACY_HEADERS//旧CONFIG対応 // インクルードファイルの読み込み #include
2015/12/08
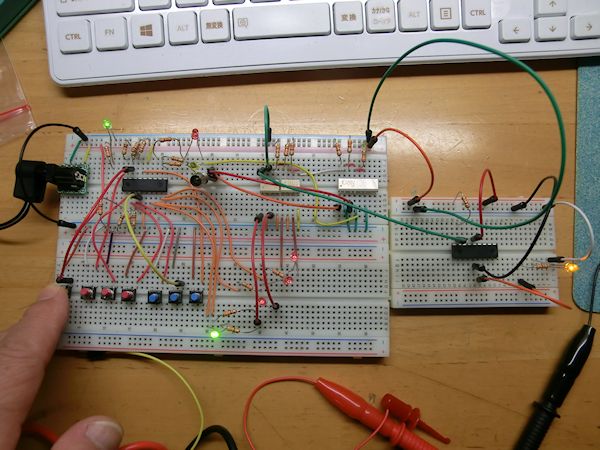
この日初めて、実験段階で、満足できる結果となりました。
タクトスイッチを押すと、PICの出力端子のポートBからの信号を受けて、SEC基板の入力端子に見立てた右側に有る 黒色のPICに繋いだ発光LEDが点灯します。
しかし、ここまで来るには、先達者の方から、自分的には、高度なプログラムを進められて、悪戦苦闘の連続
*configの設定を1カ所、 MCLREN→MCLRDIS
アドウインの基板は、リセットスイッチがあります。 テキストにあるコンフィグは、リセットスイッチありの場合ですので、 リセット無しの場合の設定にしなければなりません。
PICを理解するには、初心者の自分には、ここが向いていました。
覚書
それと、RA5の機能、627Aのデータシート 頁98 ↓
1、RA
2、MCLA ← MCLRE:RA5/ MCLR/ VPPピン機能選択ビット
1= RA5/ MCLR/ VPPピン機能はMCLRです
0= RA5/ MCLR/ VPP端子機能は、デジタル入力、MCLRは内部でVDDに接続されています
そして、
__CONFIG(MCLRDIS):外部リセット信号は使用しない、RA5がデジタル入出力で使えます。
リセット信号を使用する場合は、MCLRENとします。 ↓
https://sites.google.com/site/rakucho119/home/mplab-ide/config-wado-no-settei/16f648a
◆ Master clear reset pin function
MCLREN : 有効
MCLRDIS : 無効
Out put端子の使い方
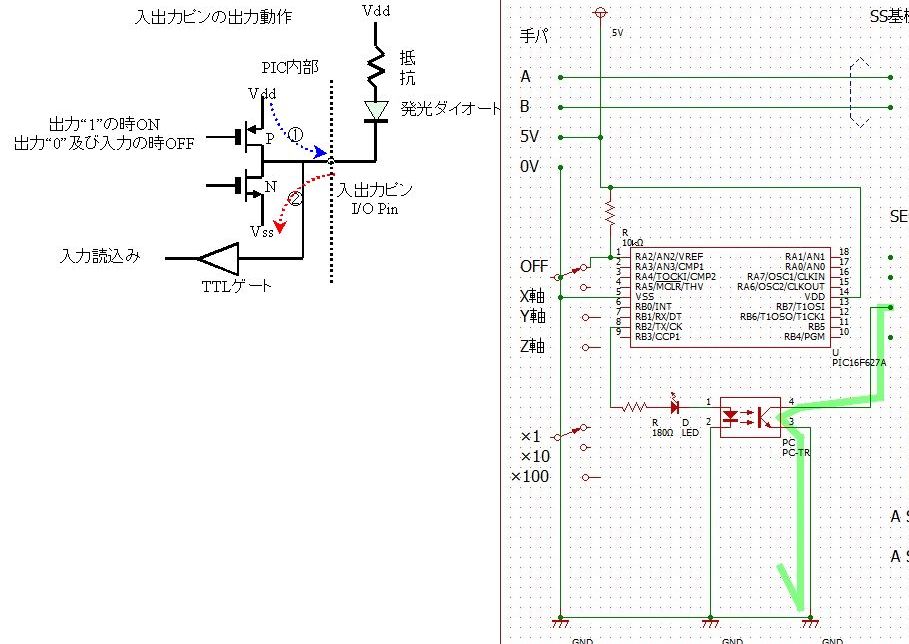
写真のように2通りの電流の流れ方がある。
合成写真右と左である。
左側は、②に流れる。
右:左と比べると、GNDの流れる線と、フォトカプラーも要らない。
但し、最大で流せる通電量は、フォトカプラには、トランジスターがあるので、かなわない。
プログラムを以下のように変える必要がある。
//RA0***************************** if(RA0 == 0){ WaitTime (500);// 待ち時間関数の呼び出 if(RA0 == 0){//もう一度確認する。 //PORTB=0x00; RB0 = 0;// LED1点灯 sw0=1;//スイッチがOFF } }
4、基板完成(便利品)
いざ、基板を作ろうとすると、大変さを感じました。
PICの足数が多いので、配線も密になります。
秋月のテクノペンがあります。
* 乾燥しないと導通しません。
それと、
協和ハーモテックの2UEWエナメル線(2種ポリウレタン銅線)
ウレタン樹脂のワニスで被覆されているので、導線と接触しても、ショートしません。
* 加熱時間を多めにしないと、被覆されている樹脂が落ちません。
↓ ↓
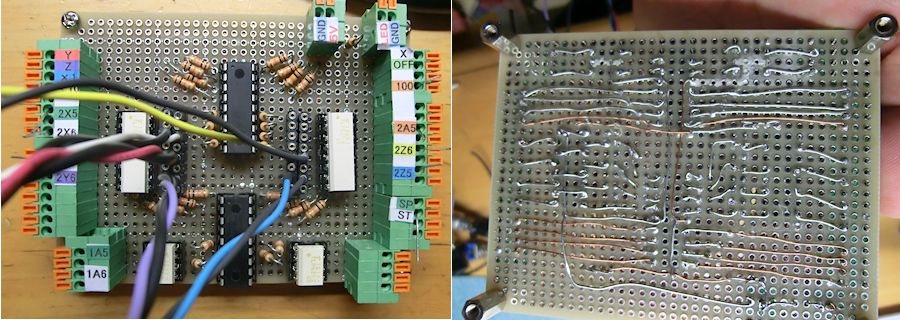
合成写真右:テクノペンで線を引いたのは、上側の左右2か所です。
5、暫定で動作確認
2015/12/23 この日初めて動作を確認できた!!

最初基盤を配線と繋いだ時、また動かない~。
でも、自作基板は、動作を確認済みでしたので、 配線を見直しました。
原因は、ソケットでした。
初めて動作した時の、嬉しさは、何度か味わってきましたが、 今までにない嬉しさでした!!
チョーhappy(^^♪(^^♪ です(笑
思わず、万歳三唱しました!!!
基板も配線が多く、自作基盤と配線とを分けて、テストした方が過ちを早く見つけられました
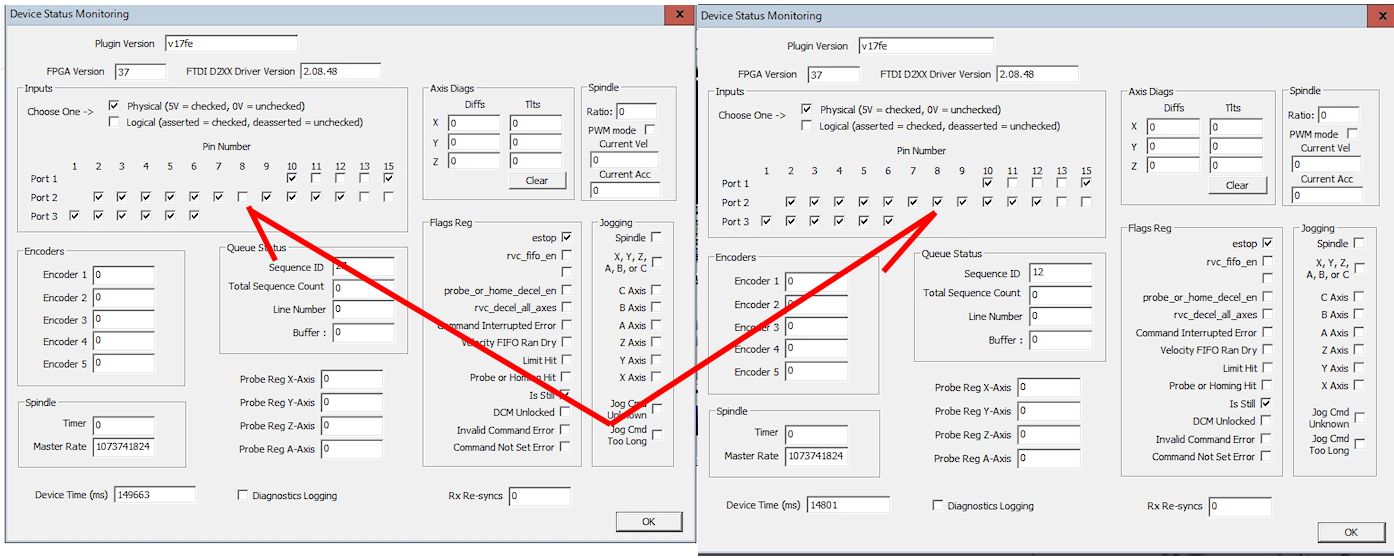
動作確認中の写真です。 導通すると、ピン番号のチェックが外れます。 外れたら、導通した証拠です。これで確認できます。
送り量の調整
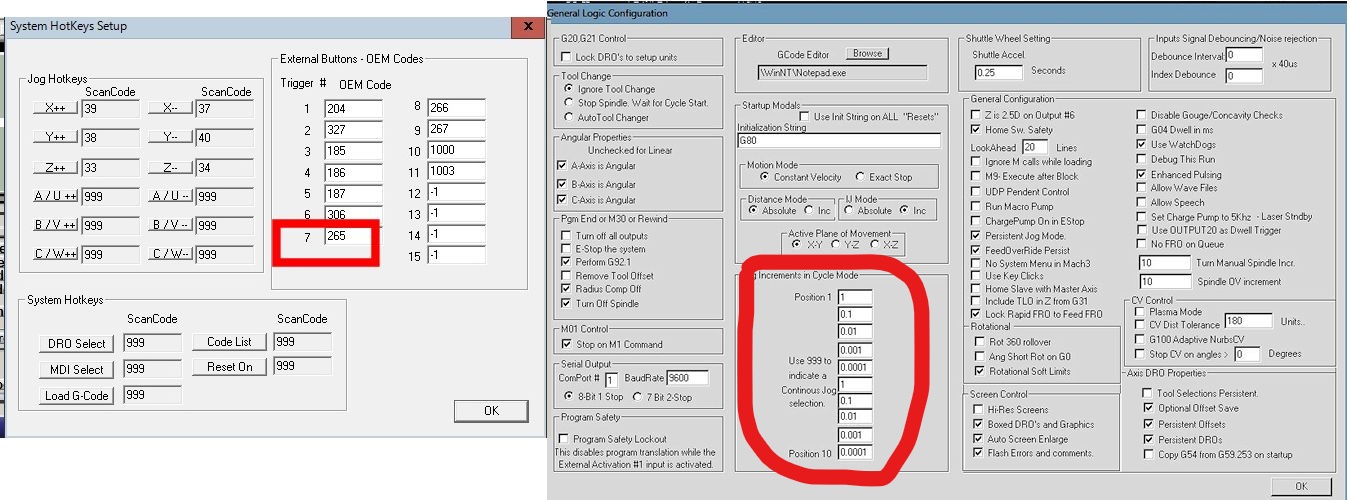
自分の手パは、デフォルトの状態では、×1の時に、送り量は4mmでした。
そこである方にお聞きしたら、ヒントを頂きました。
手パ動作の為に、一度は設定した、OEMコードを265から268にし、手パを回すと送り量が1mmになりました。 で、良く分からないのですが、
その後、OEMコードを元の265に戻しても、送り量は1mmのままでした。
写真は、1mmに変更後の写真です。
6、作業を終えて

2015/12/23 この日は、一度は、動作しなかった手パですが、配線に使われているカプラーの不良を見つけて直したら、あっけなく動作しました。
調子に乗って、Stopも設けまして、ついでに操作ボックスの製作をしつつ様子を見ました。
問題がなかったので、とりあえず、我サイトにアップすることにした。
冒頭に述べたように、テンキーで×100を操作するのは、難しく感じていました。
そういったことから、手パを画策した訳です。
手パ本体は、中華FANACですが、激安でしたし、特に問題はなさそうです。
自作で、悪戦苦闘でしたが、うまく動作して、その分、大感激でした。
これも、先達者様方のお蔭です。自分一人でしたら、途中で投げていたでしょう。
本当に、先達者は凄い。
これからは、老後の楽しみの一つに加えられそうです。 自作万歳ですね(^^♪。